ROS(RobotOperatingSystem)是一个广泛使用的机器人软件平台,它提供了一系列开源工具和库,用于帮助开发者构建机器人应用程序。本教程旨在帮助初学者轻松配置ROS系统,为后续的ROS开发打下基础。
检查电脑硬件要求:确保你的电脑满足ROS的最低硬件要求,包括处理器、内存和存储空间。
选择合适的操作系统:了解ROS支持的操作系统版本,并根据自己的需求选择合适的操作系统进行安装。
安装Linux操作系统:如果你的电脑尚未安装Linux操作系统,可以根据教程选择一种适合你的Linux发行版进行安装。
安装ROS软件包:下载并安装ROS的软件包,可以选择二进制安装或源码安装。
配置ROS环境变量:设置ROS的环境变量,以便系统能够正确地找到ROS的相关文件和工具。

创建和管理ROS工作空间:学习如何创建和管理ROS工作空间,以便将你的ROS项目组织得更好。
安装ROS依赖项:根据你的项目需求,安装和配置所需的ROS依赖项,以确保你的项目能够正常运行。
使用ROS包管理工具:学习如何使用ROS的包管理工具,以便方便地安装、更新和管理ROS软件包。
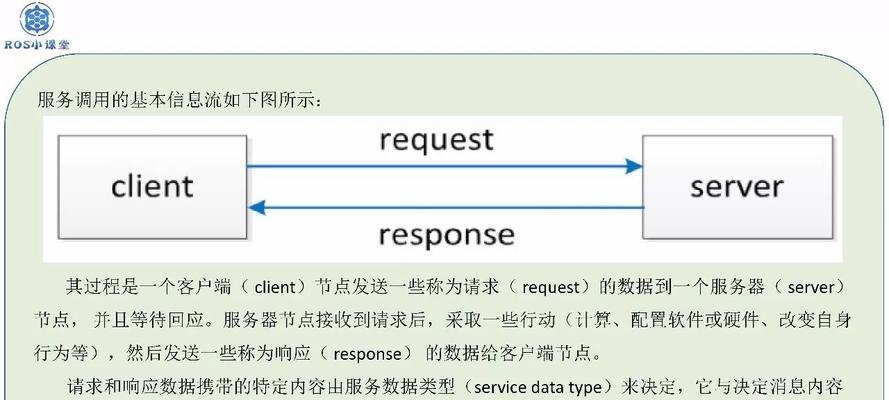
配置ROS网络设置:了解ROS的网络设置,学会配置ROS主机和节点之间的通信。
运行ROS节点:学习如何运行ROS节点,以便实现不同模块的通信和协作。
开发ROS程序:了解ROS程序的结构和编写规范,学会使用ROS提供的库函数进行开发。
使用ROS工具:掌握ROS提供的各种工具,如可视化工具、调试工具和仿真工具,以提高开发效率。
调试和故障排除:学习如何调试和排除ROS程序中的错误和问题,提高程序的稳定性和可靠性。
部署ROS应用程序:了解如何将你的ROS应用程序部署到真实的机器人平台上,并进行测试和验证。
进一步学习资源:介绍一些进一步学习ROS的资源,如官方文档、教程、社区和论坛,以便持续深入学习ROS技术。
通过本教程,你将了解如何在电脑上配置ROS系统,并能够开始进行ROS开发。希望这个教程能够帮助你顺利入门ROS,享受机器人开发的乐趣。如果在学习过程中遇到问题,不要气馁,多尝试、多实践,相信你一定会掌握ROS的技能。祝你成功!


